Ordinary Differential Equations (ODEs)#
General steps to solve ODEs (in the old way)#
Define a model function representing the right-hand-side (RHS) of the system.
Out-of-place form:
f(u, p, t)whereuis the state variable(s),pis the parameter(s), andtis the independent variable (usually time). The output is the right hand side (RHS) of the differential equation system.In-place form:
f!(du, u, p, t), where the output is saved todu. The rest is the same as the out-of-place form. The in-place function may be faster since it does not allocate a new array in each call.
Initial conditions (
u0) for the state variable(s).(Optional) parameter(s)
p.Define a problem (e.g.
ODEProblem) using the model function (f), initial condition(s) (u0), simulation time span (tspan == (tstart, tend)), and parameter(s)p.Solve the problem by calling
solve(prob).
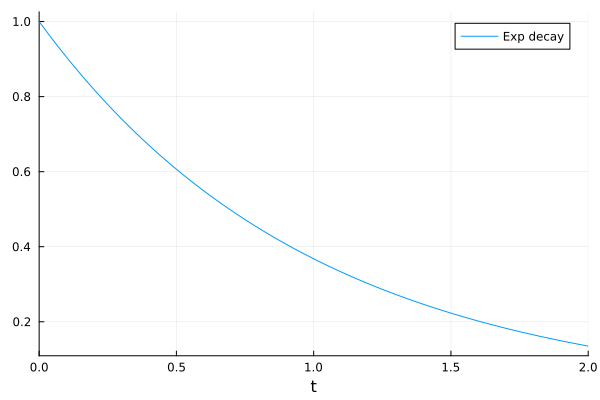
Radioactive decay#
The decaying rate of a nuclear isotope is proprotional to its concentration (number):
State variable(s)
\(C(t)\): The concentration (number) of a decaying nuclear isotope.
Parameter(s)
\(\lambda\): The rate constant of nuclear decay. The half-life: \(t_{\frac{1}{2}} = \frac{ln2}{\lambda}\).
using OrdinaryDiffEq
using Plots
The exponential decay ODE model, out-of-place (3-parameter) form
expdecay(u, p, t) = p * u
expdecay (generic function with 1 method)
p = -1.0 ## Parameter
u0 = 1.0 ## Initial condition
tspan = (0.0, 2.0) ## Simulation start and end time points
prob = ODEProblem(expdecay, u0, tspan, p) ## Define the problem
sol = solve(prob) ## Solve the problem
retcode: Success
Interpolation: 3rd order Hermite
t: 8-element Vector{Float64}:
0.0
0.10001999200479662
0.34208427066999536
0.6553980136343391
1.0312652525315806
1.4709405856363595
1.9659576669700232
2.0
u: 8-element Vector{Float64}:
1.0
0.9048193287657775
0.7102883621328676
0.5192354400036404
0.35655576576996556
0.2297097907863828
0.14002247272452764
0.1353360028400881
Visualize the solution with Plots.jl.
plot(sol, label="Exp decay")
Solution handling: https://docs.sciml.ai/DiffEqDocs/stable/basics/solution/
The mostly used feature is sol(t), the state variables at time t. t could be a scalar or a vector-like sequence. The result state variables are calculated with interpolation.
sol(1.0)
0.3678796381978344
sol(0.0:0.1:2.0)
t: 0.0:0.1:2.0
u: 21-element Vector{Float64}:
1.0
0.9048374180989603
0.8187305973051514
0.7408182261974484
0.670319782243577
0.6065302341562359
0.5488116548085096
0.49658509875978446
0.4493280239179766
0.4065692349272286
⋮
0.30119273799114377
0.2725309051375336
0.24659717503493142
0.22313045099430742
0.20189530933816474
0.18268185222253558
0.16529821250790575
0.14956912660454402
0.13533600284008812
sol.t: time points by the solver.
sol.t
8-element Vector{Float64}:
0.0
0.10001999200479662
0.34208427066999536
0.6553980136343391
1.0312652525315806
1.4709405856363595
1.9659576669700232
2.0
sol.u: state variables at sol.t.
sol.u
8-element Vector{Float64}:
1.0
0.9048193287657775
0.7102883621328676
0.5192354400036404
0.35655576576996556
0.2297097907863828
0.14002247272452764
0.1353360028400881
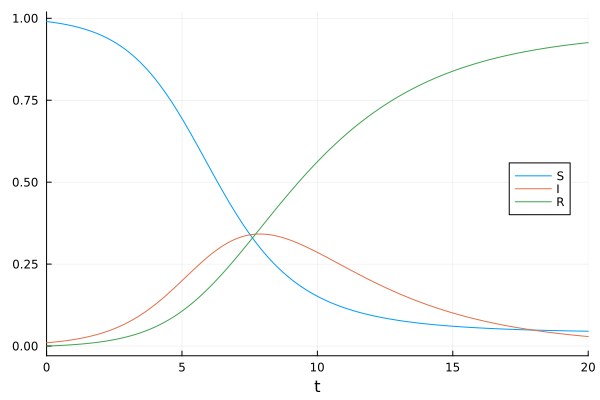
The SIR model#
A more complicated example is the SIR model describing infectious disease spreading. There are 3 state variables and 2 parameters.
State variable(s)
\(S(t)\) : the fraction of susceptible people
\(I(t)\) : the fraction of infectious people
\(R(t)\) : the fraction of recovered (or removed) people
Parameter(s)
\(\beta\) : the rate of infection when susceptible and infectious people meet
\(\gamma\) : the rate of recovery of infectious people
using OrdinaryDiffEq
using Plots
Here we use the in-place form: f!(du, u, p ,t) for the SIR model. The output is written to the first argument du, without allocating a new array in each function call.
function sir!(du, u, p, t)
s, i, r = u
β, γ = p
v1 = β * s * i
v2 = γ * i
du[1] = -v1
du[2] = v1 - v2
du[3] = v2
return nothing
end
sir! (generic function with 1 method)
Setup parameters, initial conditions, time span, and the ODE problem.
p = (β=1.0, γ=0.3)
u0 = [0.99, 0.01, 0.00]
tspan = (0.0, 20.0)
prob = ODEProblem(sir!, u0, tspan, p)
ODEProblem with uType Vector{Float64} and tType Float64. In-place: true
timespan: (0.0, 20.0)
u0: 3-element Vector{Float64}:
0.99
0.01
0.0
Solve the problem
sol = solve(prob)
retcode: Success
Interpolation: 3rd order Hermite
t: 17-element Vector{Float64}:
0.0
0.08921318693905476
0.3702862715172094
0.7984257132319627
1.3237271485666187
1.991841832691831
2.7923706947355837
3.754781614278828
4.901904318934307
6.260476636498209
7.7648912410433075
9.39040980993922
11.483861023017885
13.372369854616487
15.961357172044833
18.681426667664056
20.0
u: 17-element Vector{Vector{Float64}}:
[0.99, 0.01, 0.0]
[0.9890894703413342, 0.010634484617786016, 0.00027604504087978485]
[0.9858331594901347, 0.012901496825852227, 0.0012653436840130785]
[0.9795270529591532, 0.017282420996456258, 0.003190526044390597]
[0.9689082167415561, 0.02463126703444545, 0.006460516223998508]
[0.9490552312363142, 0.03827338797605378, 0.012671380787632141]
[0.9118629475333939, 0.06347250098224964, 0.024664551484356558]
[0.8398871089274511, 0.11078176031568547, 0.049331130756863524]
[0.7075842068024722, 0.19166147882272844, 0.1007543143747994]
[0.508146028721987, 0.29177419341470584, 0.20007977786330722]
[0.31213222024413995, 0.3415879120018046, 0.34627986775405545]
[0.18215683096365565, 0.3099983134156389, 0.5078448556207055]
[0.10427205468919205, 0.22061114011133276, 0.6751168051994751]
[0.07386737407725845, 0.14760143051851143, 0.7785311954042301]
[0.05545028910907714, 0.07997076922865315, 0.8645789416622697]
[0.047334990695892025, 0.04060565321383335, 0.9120593560902746]
[0.04522885458929332, 0.029057416110814603, 0.925713729299892]
Visualize the solution
plot(sol, labels=["S" "I" "R"], legend=:right)
sol[i]: all components at time step i
sol[2]
3-element Vector{Float64}:
0.9890894703413342
0.010634484617786016
0.00027604504087978485
sol[i, j]: ith component at time step j
sol[1, 2]
0.9890894703413342
sol[i, :]: the time series for the ith component.
sol[1, :]
17-element Vector{Float64}:
0.99
0.9890894703413342
0.9858331594901347
0.9795270529591532
0.9689082167415561
0.9490552312363142
0.9118629475333939
0.8398871089274511
0.7075842068024722
0.508146028721987
0.31213222024413995
0.18215683096365565
0.10427205468919205
0.07386737407725845
0.05545028910907714
0.047334990695892025
0.04522885458929332
sol(t,idxs=1): the 1st element in time point(s) t with interpolation. t can be a scalar or a vector.
sol(10, idxs=2)
0.28576194586813003
sol(0.0:0.1:20.0, idxs=2)
t: 0.0:0.1:20.0
u: 201-element Vector{Float64}:
0.01
0.010713819530291442
0.01147737632963402
0.012293955863322855
0.013167034902663112
0.014100286700885235
0.015097588761311391
0.016163031360643162
0.01730091874845442
0.018515771780096318
⋮
0.03561030823283819
0.03471833422630802
0.03384816241692694
0.03299928861769087
0.032171218254199684
0.031363466364657075
0.030575557599870556
0.029807026223251362
0.029057416110814645
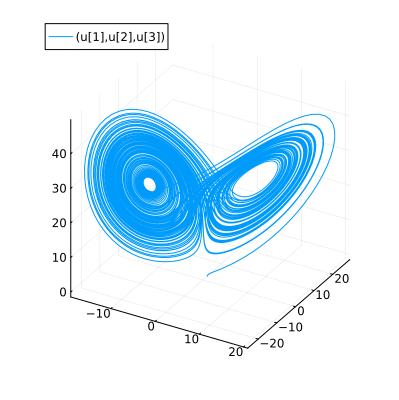
Lorenz system#
The Lorenz system is a system of ordinary differential equations having chaotic solutions for certain parameter values and initial conditions. (Wikipedia)
In this example, we will use NamedTuple for the parameters and ComponentArrays.jl for the state variaBLE to access elements by their names.
using ComponentArrays
using OrdinaryDiffEq
using Plots
function lorenz!(du, u, p, t)
du.x = p.σ * (u.y - u.x)
du.y = u.x * (p.ρ - u.z) - u.y
du.z = u.x * u.y - p.β * u.z
return nothing
end
lorenz! (generic function with 1 method)
u0 = ComponentArray(x=1.0, y=0.0, z=0.0)
p = (σ=10.0, ρ=28.0, β=8 / 3)
tspan = (0.0, 100.0)
prob = ODEProblem(lorenz!, u0, tspan, p)
sol = solve(prob)
retcode: Success
Interpolation: 3rd order Hermite
t: 1292-element Vector{Float64}:
0.0
3.5678604836301404e-5
0.0003924646531993154
0.003262408731175873
0.009058076622686189
0.01695647090176743
0.027689960116420883
0.041856352219618344
0.060240411865493296
0.08368541210909924
⋮
99.43545175575305
99.50217600300971
99.56297541572351
99.62622492183432
99.69561088424294
99.77387244562912
99.86354266863755
99.93826978918452
100.0
u: 1292-element Vector{ComponentArrays.ComponentVector{Float64, Vector{Float64}, Tuple{ComponentArrays.Axis{(x = 1, y = 2, z = 3)}}}}:
ComponentVector{Float64}(x = 1.0, y = 0.0, z = 0.0)
ComponentVector{Float64}(x = 0.9996434557625105, y = 0.0009988049817849058, z = 1.781434788799189e-8)
ComponentVector{Float64}(x = 0.9961045497425811, y = 0.010965399721242457, z = 2.1469553658389193e-6)
ComponentVector{Float64}(x = 0.9693591548287857, y = 0.0897706331002921, z = 0.00014380191884671585)
ComponentVector{Float64}(x = 0.9242043547708632, y = 0.24228915014052968, z = 0.0010461625485930237)
ComponentVector{Float64}(x = 0.8800455783133068, y = 0.43873649717821195, z = 0.003424260078582332)
ComponentVector{Float64}(x = 0.8483309823046307, y = 0.6915629680633586, z = 0.008487625469885364)
ComponentVector{Float64}(x = 0.8495036699348377, y = 1.0145426764822272, z = 0.01821209108471829)
ComponentVector{Float64}(x = 0.9139069585506618, y = 1.442559985646147, z = 0.03669382222358562)
ComponentVector{Float64}(x = 1.0888638225734468, y = 2.0523265829961646, z = 0.07402573595703686)
⋮
ComponentVector{Float64}(x = 1.2013409155396158, y = -2.429012698730855, z = 25.83593282347909)
ComponentVector{Float64}(x = -0.4985909866565941, y = -2.2431908075030083, z = 21.591758421186338)
ComponentVector{Float64}(x = -1.3554328352527145, y = -2.5773570617802326, z = 18.48962628032902)
ComponentVector{Float64}(x = -2.1618698772305467, y = -3.5957801801676297, z = 15.934724265473792)
ComponentVector{Float64}(x = -3.433783468673715, y = -5.786446127166032, z = 14.065327938066913)
ComponentVector{Float64}(x = -5.971873646288483, y = -10.261846004477597, z = 14.060290896024572)
ComponentVector{Float64}(x = -10.941900618598972, y = -17.312154206417734, z = 20.65905960858999)
ComponentVector{Float64}(x = -14.71738043327772, y = -16.96871551014668, z = 33.06627229408802)
ComponentVector{Float64}(x = -13.714517151605754, y = -8.323306384833089, z = 38.798231477265624)
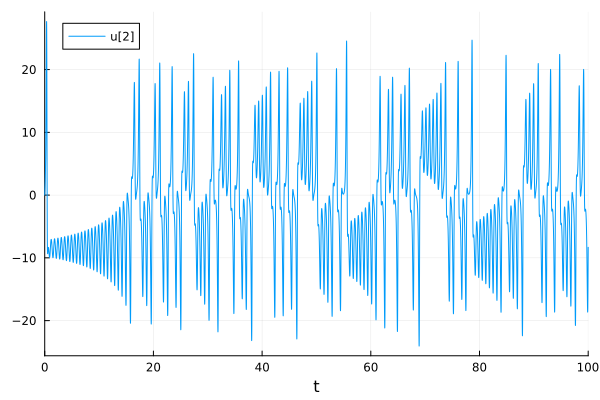
idxs=(1, 2, 3) makes a phase plot with 1st, 2nd, and the 3rd state variable.
plot(sol, idxs=(1, 2, 3), size=(400, 400))
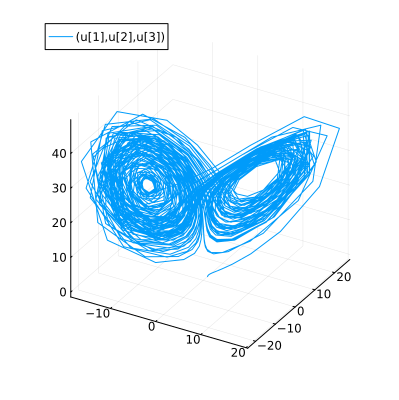
The plot recipe is using interpolation for smoothing. You can turn off denseplot to see the difference.
plot(sol, idxs=(1, 2, 3), denseplot=false, size=(400, 400))
The zeroth variable in idxs is the independent variable (usually time). The following command plots the time series of the second state variable (y).
plot(sol, idxs=(0, 2))
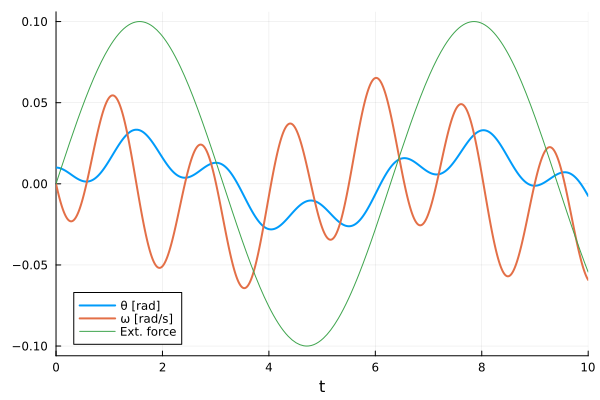
Non-autonomous ODEs#
In non-autonomous ODEs, term(s) in the right-hand-side (RHS) maybe time-dependent. For example, in this pendulum model has an external, time-dependent, force.
\(\theta\): pendulum angle
\(\omega\): angular rate
M: time-dependent external torque
\(l\): pendulum length
\(g\): gradational acceleration
using OrdinaryDiffEq
using Plots
function pendulum!(du, u, p, t)
l = 1.0 ## length [m]
m = 1.0 ## mass [kg]
g = 9.81 ## gravitational acceleration [m/s²]
du[1] = u[2] ## θ'(t) = ω(t)
du[2] = -3g / (2l) * sin(u[1]) + 3 / (m * l^2) * p(t) # ω'(t) = -3g/(2l) sin θ(t) + 3/(ml^2)M(t)
end
u0 = [0.01, 0.0] ## initial angular deflection [rad] and angular velocity [rad/s]
tspan = (0.0, 10.0) ## time interval
M = t -> 0.1 * sin(t) ## external torque [Nm] as the parameter for the pendulum model
prob = ODEProblem(pendulum!, u0, tspan, M)
sol = solve(prob)
plot(sol, linewidth=2, xaxis="t", label=["θ [rad]" "ω [rad/s]"])
plot!(M, tspan..., label="Ext. force")
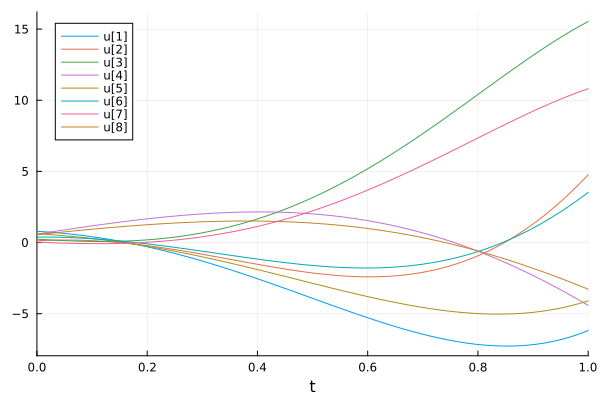
Linear ODE system#
The ODE system could be anything as long as it returns the derivatives of state variables. In this example, the ODE system is described by a matrix differential operator.
\(\dot{u} = Au\)
using OrdinaryDiffEq
using Plots
A = [
1.0 0 0 -5
4 -2 4 -3
-4 0 0 1
5 -2 2 3
]
u0 = rand(4, 2)
tspan = (0.0, 1.0)
f = (u, p, t) -> A * u
prob = ODEProblem(f, u0, tspan)
sol = solve(prob)
plot(sol)
This notebook was generated using Literate.jl.