Docs: https://
In Multiple Shooting, the training data is split into overlapping intervals. The solver (OptimizationPolyalgorithms.PolyOpt()) is trained on individual intervals. The results are stiched together.
This simple method assumes no noise in the data. A more robust version can be found at JuliaSimModelOptimizer
using ComponentArrays
using DiffEqFlux
using DiffEqFlux: group_ranges
using Lux
using Optimization
using OptimizationPolyalgorithms
using OrdinaryDiffEq
using Plots
using Random
rng = Random.Xoshiro(0)Random.Xoshiro(0xdb2fa90498613fdf, 0x48d73dc42d195740, 0x8c49bc52dc8a77ea, 0x1911b814c02405e8, 0x22a21880af5dc689)Define initial conditions and time steps
datasize = 51
u0 = Float32[2.0, 0.0]
tspan = (0.0f0, 5.0f0)
tsteps = range(tspan[begin], tspan[end], length = datasize)0.0f0:0.1f0:5.0f0Generate data from the true function:
function trueODEfunc!(du, u, p, t; true_A = Float32[-0.1 2.0; -2.0 -0.1])
du .= ((u.^3)'true_A)'
end
prob_trueode = ODEProblem(trueODEfunc!, u0, tspan)
ode_data = Array(solve(prob_trueode, Tsit5(), saveat = tsteps))┌ Warning: Verbosity toggle: dt_epsilon
│ Initial timestep too small (near machine epsilon), using default: dt = 1.0e-6
└ @ OrdinaryDiffEqCore ~/.julia/packages/OrdinaryDiffEqCore/rnOL4/src/initdt.jl:196
2×51 Matrix{Float32}:
2.0 1.76453 0.666819 -0.580549 … 0.0619097 -0.107015 -0.271154
0.0 1.4286 1.86579 1.80632 0.949526 0.941073 0.931262Define the Neural Network using Lux.jl
nn = Lux.Chain(
x -> x.^3,
Lux.Dense(2, 16, tanh),
Lux.Dense(16, 2)
)
p_init, st = Lux.setup(rng, nn)
ps = ComponentArray(p_init)
pd, pax = getdata(ps), getaxes(ps)(Float32[-1.8019577, -0.18273845, 1.677652, 0.19449931, 0.7557112, 1.1159611, -1.581186, 1.7986798, -0.36156967, -1.9202054 … 0.35582402, -0.29064924, 0.32653868, 0.36876014, -0.35387143, 0.12959939, 0.25605455, -0.20957911, 0.10817152, -0.20544955], (Axis(layer_1 = ViewAxis(1:0, Shaped1DAxis((0,))), layer_2 = ViewAxis(1:48, Axis(weight = ViewAxis(1:32, ShapedAxis((16, 2))), bias = ViewAxis(33:48, Shaped1DAxis((16,))))), layer_3 = ViewAxis(49:82, Axis(weight = ViewAxis(1:32, ShapedAxis((2, 16))), bias = ViewAxis(33:34, Shaped1DAxis((2,)))))),))Define the NeuralODE problem
neuralode = NeuralODE(nn, tspan, Tsit5(), saveat = tsteps)
prob_node = ODEProblem((u,p,t)->nn(u,p,st)[1], u0, tspan, ComponentArray(p_init))ODEProblem with uType Vector{Float32} and tType Float32. In-place: false
Non-trivial mass matrix: false
timespan: (0.0f0, 5.0f0)
u0: 2-element Vector{Float32}:
2.0
0.0Parameters for Multiple Shooting
group_size = 3
continuity_term = 200 ## Penalty for discontinuity
function loss_function(data, pred)
return sum(abs2, data .- pred)
end
l1, preds = multiple_shoot(ps, ode_data, tsteps, prob_node, loss_function, Tsit5(), group_size; continuity_term)
function loss_multiple_shooting(theta)
ps = ComponentArray(theta, pax)
loss, currpred = multiple_shoot(ps, ode_data, tsteps, prob_node, loss_function,
Tsit5(), group_size; continuity_term)
return loss
endloss_multiple_shooting (generic function with 1 method)Animate training process in the callback function
function plot_multiple_shoot(plt, preds, group_size)
ranges = group_ranges(datasize, group_size)
for (i, rg) in enumerate(ranges)
plot!(plt, tsteps[rg], preds[i][1,:], markershape=:circle, label="Group $(i)")
end
end
anim = Animation()
lossrecord=Float64[]
callback = function (state, l; doplot = true, prob_node = prob_node)
if doplot
l1, preds = multiple_shoot(
ComponentArray(state.u, pax), ode_data, tsteps, prob_node, loss_function,
Tsit5(), group_size; continuity_term)
plt = scatter(tsteps, ode_data[1,:], label = "Data")
plot_multiple_shoot(plt, preds, group_size)
frame(anim)
push!(lossrecord, l)
end
return false
end#10 (generic function with 1 method)Solve the problem using OptimizationPolyalgorithms.PolyOpt().
adtype = Optimization.AutoZygote()
optf = Optimization.OptimizationFunction((x,p) -> loss_multiple_shooting(x), adtype)
optprob = Optimization.OptimizationProblem(optf, pd)
@time res_ms = Optimization.solve(optprob, PolyOpt(), callback = callback, maxiters = 300)
println("Loss is ", loss_multiple_shooting(res_ms.u)[1])134.680668 seconds (471.87 M allocations: 29.129 GiB, 4.58% gc time, 63.45% compilation time: 4% of which was recompilation)
Loss is 11.947134
Loss over epochs
plot(lossrecord, yscale=:log10, label="Loss", xlabel="Iterations", ylabel="Loss (log10)", title="Loss over iterations")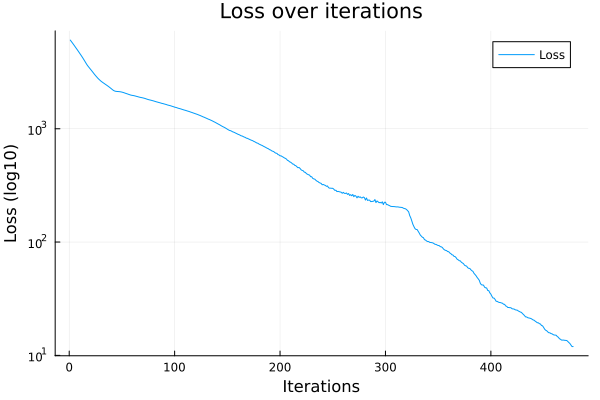
Visualize the fitting processes
mp4(anim, fps=15)[ Info: Saved animation to /tmp/jl_DcP45k3sfi.mp4
This notebook was generated using Literate.jl.